Work and energy
Potential energy
Kinetic energy
Work
Work done by a force
Work done by \( \vec{F} \) is \( W = 6 J \). Assume no gravity, frictionless, constraint force \( \vec{R} \) of the slot of the mass.
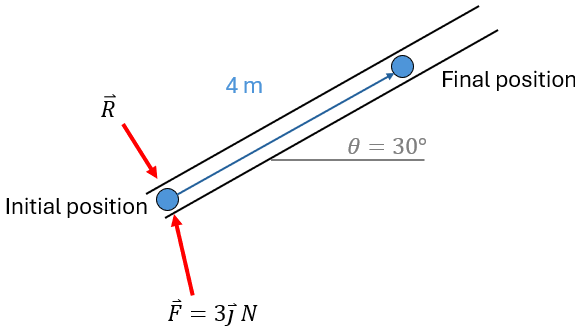
What is the increase in energy of the mass?
- \( > 6 J \)
- \( 6 J \)
- \( < 6 J \)
- Need to first find \( \vec{R} \)
Conservative vs non-conservative forces
A conservative force is one such that the work done by the force only depends on the initial and final positions of the object (i.e independent of the path taken by the object). Examples of conservative forces are gravity and spring force, where only the initial and final displacements are needed to calculate the work done by those forces. Examples of a non-conservative force are any type of drag forces (e.g friction, air resistance).
The diagram below illustrates different paths and the work done by a conservative forces vs. a non-conservative force.
If the force moving an object from point \(A\) to point \(B\) was conservative, the work done by that force in all paths is equal. If the force was non-conservative, the work done by that force is not equal, and it depends on the path length.
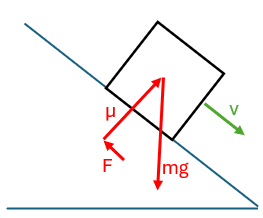
Work done by friction
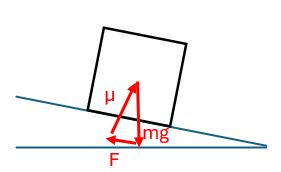
Work done by friction can be positive, zero, or negative.
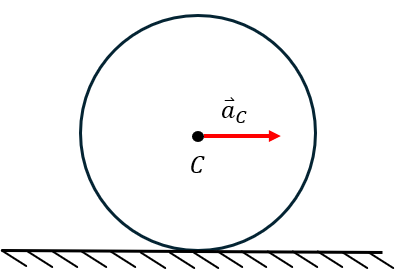
- Which direction does friction force \( \vec{F} \) act?
- Right
- Zero
- Left
- What is the work done by friction?
- \( > 0 \)
- Zero
- \( < 0 \)
Work done by a moment
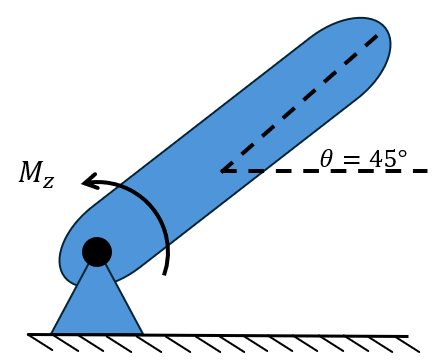
Rod shown above starts from rest, falls to horizontal, friction moment of 2 Nm. What is the work done by friction?
- \( \geq 2 J \)
- \( 0 < W < 2 J \)
- \( = 0 \)
- \( W \leq -2 J \)
Friction
| Stick | Transition | Slip |
|---|---|---|
 |
|
 |
Solution procedure
Known Case
- Determine case: stick, transition, slip (and direction)
- FBD, equations of motion (or statics), solve
Unknown Case
- Try stick
- Assume \( v_{px} = 0 \) and \( a_{px} = 0 \)
- Solve for N, F
- Check \( |F| \leq \mu |N| \)
- Try slip
- Assume \( F = \mu N \) (in one direction)
- Solve for motion of contact point and N, F
- Check \( v_{px} \neq 0 \) or \( a_{px} \neq 0 \) and \( \hat{F} \) opposed motion (\( \hat{v} \) or \( \hat{a} \))
- Otherwise
- Assume \( F = \mu N \) (in opposite direction) and resume from step B.2